 So after Tuesday's presentations I decided to recreate my light project, since the last one failed. I went to the Dollar store for inspiration and found a small monster truck toy. I took it apart...and so it began. I already had a PIR sensor so I thought it would be funny to make a critter that "ran" at you when you needed some light. I looked online for code that would make the PIR sensor behave the way I wanted. I found code that gave the PIR appropriate delays. Thanks
So after Tuesday's presentations I decided to recreate my light project, since the last one failed. I went to the Dollar store for inspiration and found a small monster truck toy. I took it apart...and so it began. I already had a PIR sensor so I thought it would be funny to make a critter that "ran" at you when you needed some light. I looked online for code that would make the PIR sensor behave the way I wanted. I found code that gave the PIR appropriate delays. Thanks Kristian Gohlke / krigoo (_) gmail (_) com / http://krx.at
* @date: 3. September 2006
So the original code looks like this
//VARS
//the time we give the sensor to calibrate (10-60 secs according to the datasheet)
int calibrationTime = 30;
//the time when the sensor outputs a low impulse
long unsigned int lowIn;
//the amount of milliseconds the sensor has to be low
//before we assume all motion has stopped
long unsigned int pause = 5000;
boolean lockLow = true;
boolean takeLowTime;
int pirPin = 3; //the digital pin connected to the PIR sensor's output
int ledPin = 13;
/////////////////////////////
//SETUP
void setup(){
Serial.begin(9600);
pinMode(pirPin, INPUT);
pinMode(ledPin, OUTPUT);
digitalWrite(pirPin, LOW);
//give the sensor some time to calibrate
Serial.print("calibrating sensor ");
for(int i = 0; i < locklow =" false;" takelowtime =" true;" lowin =" millis();" takelowtime =" false;"> pause){
//makes sure this block of code is only executed again after
//a new motion sequence has been detected
lockLow = true;
Serial.print("motion ended at "); //output
Serial.print((millis() - pause)/1000);
Serial.println(" sec");
delay(50);
}
}
Then I changed a few things to accommodate my motor and LEDs
New code is
New code is
int calibrationTime = 30;
//the time when the sensor outputs a low impulse
long unsigned int lowIn;
//the amount of milliseconds the sensor has to be low
//before we assume all motion has stopped
long unsigned int pause = 3000;
boolean lockLow = true;
boolean takeLowTime;
int pirPin = 3; //the digital pin connected to the PIR sensor's output
int motorPin = 13; //the digital pin connected to the motor's output
int ledPin = 8; //the digital pin connected to the led output
int led2Pin = 10; //the digital pin connected to the led output
/////////////////////////////
//SETUP
void setup(){
Serial.begin(9600);
pinMode(pirPin, INPUT);
pinMode(motorPin, OUTPUT);
pinMode(ledPin, OUTPUT);
pinMode(led2Pin, OUTPUT);
digitalWrite(pirPin, LOW);
//give the sensor some time to calibrate
Serial.print("calibrating sensor ");
for(int i = 0; i < locklow =" false;" takelowtime =" true;" lowin =" millis();" takelowtime =" false;"> pause){
//makes sure this block of code is only executed again after
//a new motion sequence has been detected
lockLow = true;
Serial.print("motion ended at "); //output
Serial.print((millis() - pause)/1000);
Serial.println(" sec");
delay(50);
}
}
}
}
I set up the breadboard like this...

And put it all together.


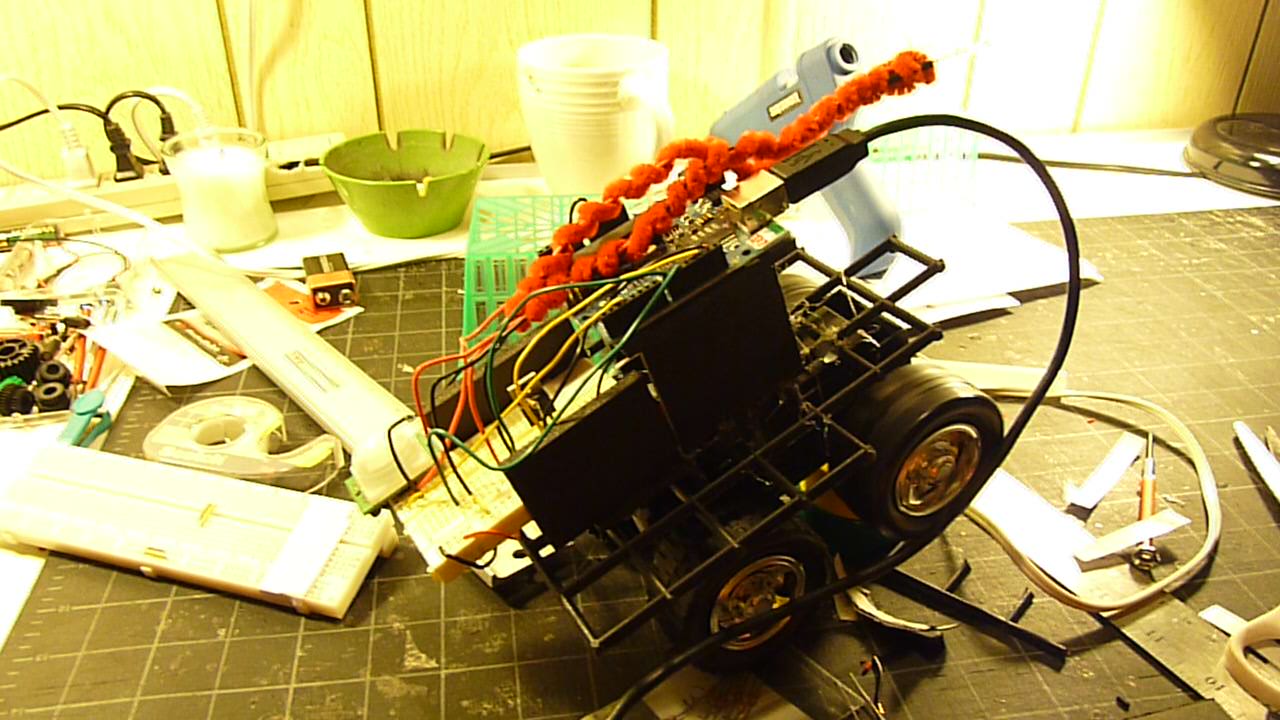
And the final monster



No comments:
Post a Comment